
Mechanical Engineering Seniors Design Insect-Inspired Robot to Assist First Responders
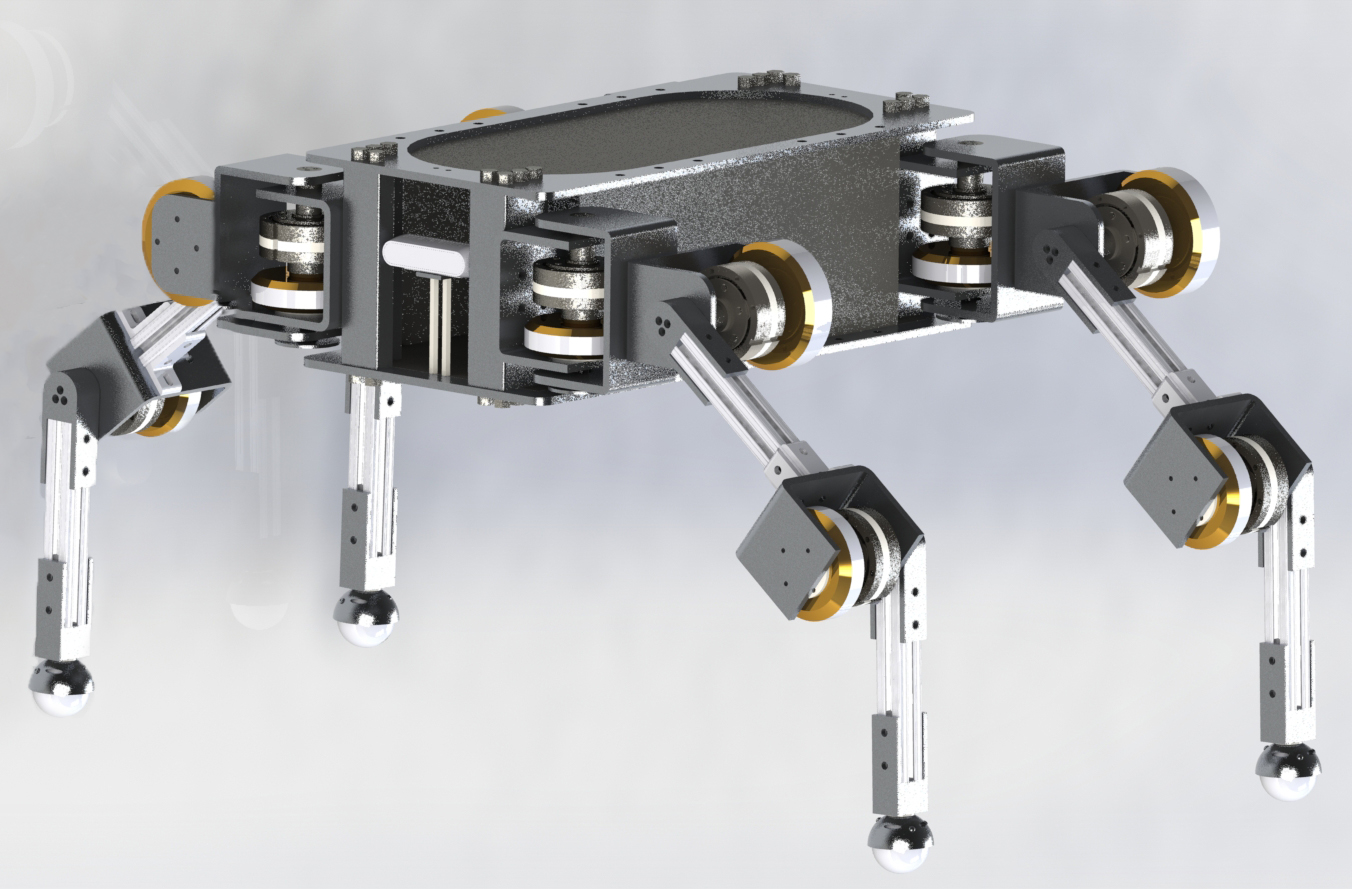
Computer rendering of ARDENT robot designed to assist search-and-rescue teams in precarious terrain. Courtesy of Nathan Boyd.
With a team of California State University, Northridge students specializing in a variety of disciplines, Nathan Boyd and Holland Mills, who both received their bachelor’s degree in mechanical engineering on May 17, have led the effort to create an insect-inspired robot that can aid first responders in navigating dangerous topography and collapsed structures, reducing the risk to rescue personnel.
A multi-legged walking robot, ARDENT (Arthropod Robot for Dynamic Environments and Terrains) is designed to assist search-and-rescue teams in precarious terrain — like many of the areas around Northridge in 1994 after the earthquake that devastated the campus and much of the Los Angeles area. Its main purpose, Mills said, is to protect first responders and minimize the loss of human life in the process of saving others.
“If the robot gets destroyed, that’ll be pretty bad,” Mills said. “But at least we didn’t lose a human life.”
ARDENT’s four-legged design was inspired by the anatomy of an insect and boasts impressive mobility around debris and other “unstructured” terrain. It has a span of 52 inches but can compress to 12 inches, allowing the robot to squeeze into areas human rescuers cannot.
“Its normal gait is with its knees outward, to its sides. But when it needs to squeeze through something smaller, it’s capable of bringing its legs completely forward because we designed it to do so,” Mills said.
3-D map of Jacaranda Hall generated by ARDENT. Courtesy of Nathan Boyd.
ARDENT can be controlled remotely, allowing rescue teams to scout one area while it searches another. Its simultaneous localization and mapping (SLAM) technology then uses sensors to generate a 3-D map of the space — which can later be translated into a 2-D map. These maps can help inform rescue teams which areas are safe for entry. The student team behind the project tested this technology on campus by generating a 3-D map of Jacaranda Hall, where most of the project research and robot construction took place.
The sensing technology used by the robot to generate the maps is something akin to programs used by self-driving cars.
“We [used] camera vision,” Boyd said. “We had a pair of cameras that would see an environment, and a couple of algorithms that would recognize contrast and some landmarks. From there, we derive a whole bunch of data in order to build the map around us and keep track of how the robot’s moving in space.”
ARDENT uses RGB-D (red, green, blue and depth) cameras that record video at 30 frames per second, to accomplish real-time mapping, Boyd said.
The concept of a multi-legged search-and-rescue robot began as a response to the 2015 U.S. Defense Advanced Research Projects Agency’s Robotics Challenge, where major institutions and renowned robotics teams, including Massachusetts Institute of Technology Robotics and Japanese robotics team SCHAFT, competed to construct robots that complete tasks in hazardous conditions and environments. The competition inspired Boyd and Mills, who have been working together for three years, to come up with their own design and develop it as their senior capstone project at CSUN.

First-person view of map building process through ARDENT’s camera vision, taken during Senior Design Project Showcase on April 26 at CSUN’s University Student Union. Courtesy of Nathan Boyd.
The project also created new opportunities within CSUN’s mechanical engineering program to cross-integrate different disciplines. ARDENT’s team was composed of 18 CSUN students and five volunteers specializing in mechanical engineering, computer science, computer and electrical engineering, and manufacturing systems engineering and management.
The project began in summer 2018. That fall, students started work on the robot’s construction, under the guidance of their mentor, professor Amiel Hartman. Over the spring 2019 semester, Boyd and Mills also exhibited their work in the 23rd Annual CSUNposium and the 2019 Senior Design Project Showcase on campus.
Looking beyond the completion of their senior project, Boyd and Mills are pitching ARDENT as an ongoing project in CSUN’s Department of Mechanical Engineering. The senior design projects in CSUN’s College of Engineering and Computer Science, such as a Formula Society of Automotive Engineering (SAE) race car and a human-powered vehicle, are tackled by new teams each academic year, as students reimagine and hone their engineering concepts for national competitions.
ARDENT is in its engineering prototype stage, where the team has successfully created a working model that can be tested, replicated and modified. Boyd and Mills noted that they hope future CSUN students will carry the project forward.

The ARDENT team pose for a photo with advising professor Amiel Hartman (far right) outside Jacaranda Hall. Photo courtesy of Holland Mills.
“One of the big things that we were trying to get done this year was build that precedent, build the knowledge base, set up something where the adviser understands the research — and where the students are able to follow it and actually execute on it,” Boyd said.
Fortunately for next year’s ARDENT team, Boyd himself will return to CSUN post-graduation next year to guide them as their adviser.
Boyd and Mills plan to continue their research in graduate school, wherever they decide to attend, and they said they hope their innovations will spread to systems beyond ARDENT.
“There is a bit of a stumbling block or hesitation when it comes to diving into something like developing a robot — you don’t know where to begin,” Mills said. “With this project, we can show that it is accessible, and it is achievable.”